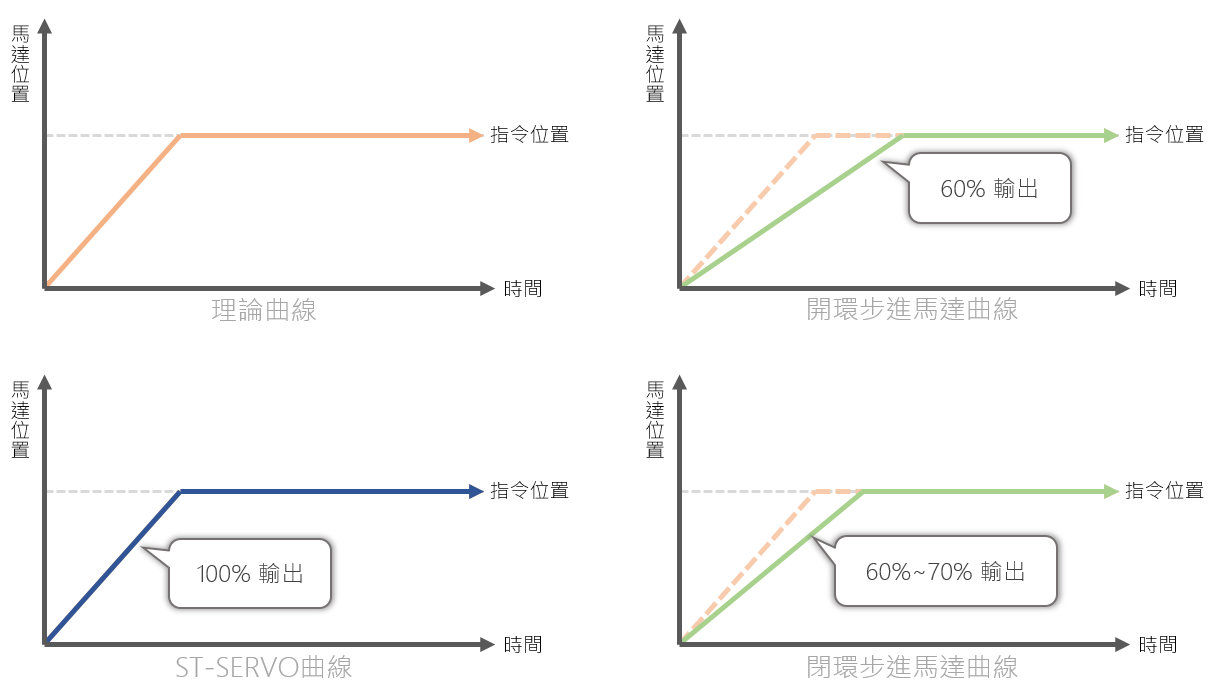
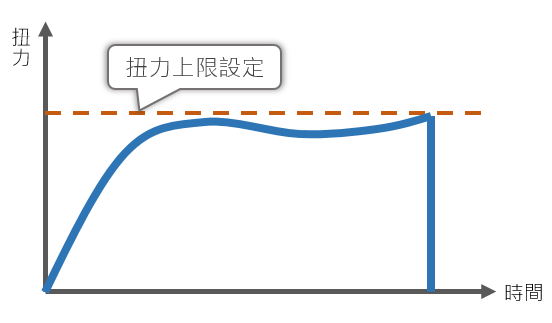
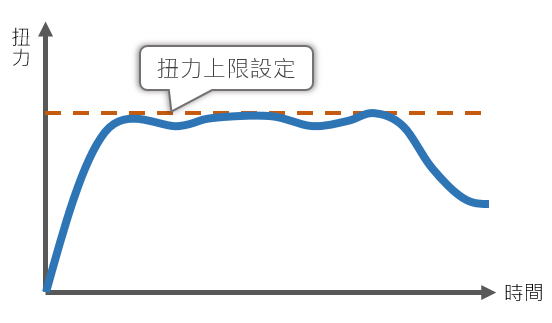
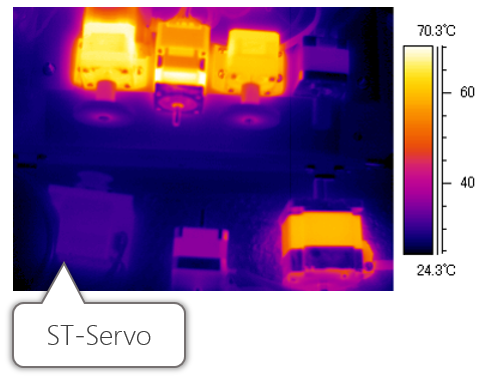
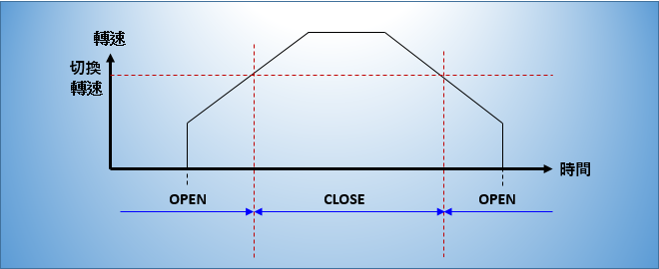
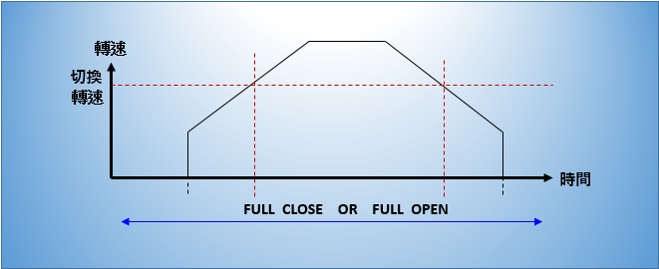
ST-Servo伺服步進馬達 採用伺服閉環控制系統 搭載高效能編碼器封閉回路控制的步進系統。超低發熱、極省能源、低振動小容量、高輸出的構成元件。在位置控制、速度控制、扭力控制、壓制控制、低轉速高扭力、旋轉安定性上表現非常優越。 超低發熱 ‧ 極省能源 因應負載需求控制最適宜電流 低噪音 實現業界中首屈一指低噪音,對應醫療應用與安靜環境的最佳方案 4種控制模式 位置控制、速度控制、扭力控制、壓制控制的四種模式能夠瞬間驅動切換。 彈性化程式控制 內建32~64組程式控制,可通過Modbus控制 產品型錄下載 低耗能 *有外力產生時,會因應外力的狀態即時增加/減少電流的輸出,降低能耗損失,同時不影響應有之性能 全效能 ST-SERVO是透過編碼器計數後與步進數對比,根據實際位置輸出相應的電流大小與相位,實現高性能的控制技術,扭力輸出可以直接100%輸出(位置/速度150%)設定並不會發生失步。一般開環步進馬達因不帶編碼器,因此無法得知馬達位置,也不知失步何時會發生,因此扭力輸出只敢設定極限的60%上下,藉以防止失步的問題產生。閉環式步進馬達因帶編碼器的關係,雖然知道馬達的位置,但對馬達的驅動仍是固定電流的方式,無法應負荷來隨時改變扭力的輸出,雖說有編碼器可得知失步狀態再作馬達的重啟,失步位置的修正,但仍無法達到100%全輸出的控制。 扭力控制 可針對所需要驅動物件進行“指定扭力”設定,作動中一旦扭力達到指定扭力值時,即立刻停止。 亦可對所需要驅動物件進行“扭力上限”設定,作動中扭力最多只會到達扭力上限不會超過,對此可進行特定動作之達成(如上緊螺絲扭力)。 超靜音 *此測試於Pitch 2mm的滑台上,安裝ST-Servo與一般步進馬達,於運轉時的噪音差異 超低震動 *此測試於Pitch 2mm的滑台上,安裝ST-Servo與一般步進馬達,於運轉時的噪音差異 低發熱 可針對所需要驅動物件進行“指定扭力”設定,作動中一旦扭力達到指定扭力值時,即立刻停止。 *透過熱感應儀作的馬達發熱狀態測試。測試的馬達為運轉後2小時的狀態。可以看到的是ST-SERVO明顯較市面上其它品牌的馬達發熱來的低。 運作中切換開閉環 可用轉速在運行間切換開環與閉環的控制,利用開環與閉環不同的屬性減少整定時間的浪費 也可以進行全時開環或全時閉環的控制動作。以符合不同的使用需求 電動夾爪應用示範 透過ST-Servo的扭力偵測感應物件大小,並給予合適的夾持力道。 過程無需透過額外感應器即可控制到讓蓋玻片不會碎裂,節省機構,控制精準,可自行設計或搭配夾爪。 扭力控制(張力控制示範) 透過單邊ST-Servo馬達,達成張力控制的需求 產品型錄下載 想了解更多資訊,歡迎聯繫我們 您的公司全名 * 行業別 * 製造-製造設備製造-半導體製造-車載電子製造-生醫器械製造-金屬製品製造-電子類農、林、漁業礦業建築業製造業運輸、通訊、能源、衛生批發貿易業零售業金融、保險、房地產服務業服務-教育公共行政其他 姓名 * 聯絡電話 * Email * 主旨 * 產品咨詢服務需求其他 內容 *